


بازوهای مکانیکی مشابه دستهای انسان
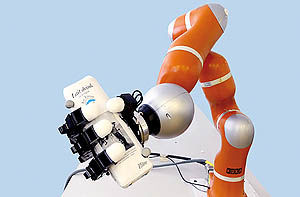
محققان روبات چهارانگشتی ساختهاند که میتواند مشابه انسان اجسام پرتابشده در هوا مثل یک توپ، بطری یا یک راکت تنیس را بگیرد. این روبات میتواند کاربردهای بالقوه فراوانی داشته باشد؛ بهعنوان مثال در ماهوارههای فضایی یا خودروهای زمینی از برخورد اجسام به ماهواره یا خودرو جلوگیری کند.
تفاوت این روبات یک تفاوت عمده با سایر مدلهای مشابه دارد و آن، عدم برنامه دادن دقیق به آن از پیش است. به عبارت دقیقتر، گرفتن اشیای پرتشده یک عمل غیرقابل پیشبینی است و برای این منظور، روبات مجبور است اطلاعات زیادی را در مدت زمانی کوتاه مورد تجزیه و تحلیل قرار دهد؛ بر این اساس، محققان برای آموزش این روبات به جای برنامههای از پیش تعیینشده از روشهای یادگیری انسان استفاده کردند.
تفاوت این روبات یک تفاوت عمده با سایر مدلهای مشابه دارد و آن، عدم برنامه دادن دقیق به آن از پیش است. به عبارت دقیقتر، گرفتن اشیای پرتشده یک عمل غیرقابل پیشبینی است و برای این منظور، روبات مجبور است اطلاعات زیادی را در مدت زمانی کوتاه مورد تجزیه و تحلیل قرار دهد؛ بر این اساس، محققان برای آموزش این روبات به جای برنامههای از پیش تعیینشده از روشهای یادگیری انسان استفاده کردند.
محققان روبات چهارانگشتی ساختهاند که میتواند مشابه انسان اجسام پرتابشده در هوا مثل یک توپ، بطری یا یک راکت تنیس را بگیرد. این روبات میتواند کاربردهای بالقوه فراوانی داشته باشد؛ بهعنوان مثال در ماهوارههای فضایی یا خودروهای زمینی از برخورد اجسام به ماهواره یا خودرو جلوگیری کند.
تفاوت این روبات یک تفاوت عمده با سایر مدلهای مشابه دارد و آن، عدم برنامه دادن دقیق به آن از پیش است. به عبارت دقیقتر، گرفتن اشیای پرتشده یک عمل غیرقابل پیشبینی است و برای این منظور، روبات مجبور است اطلاعات زیادی را در مدت زمانی کوتاه مورد تجزیه و تحلیل قرار دهد؛ بر این اساس، محققان برای آموزش این روبات به جای برنامههای از پیش تعیینشده از روشهای یادگیری انسان استفاده کردند.
به این ترتیب، این روباتها با تقلید رفتار و آزمون و خطا، گرفتن اجسام را یاد میگیرند.
تفاوت این روبات یک تفاوت عمده با سایر مدلهای مشابه دارد و آن، عدم برنامه دادن دقیق به آن از پیش است. به عبارت دقیقتر، گرفتن اشیای پرتشده یک عمل غیرقابل پیشبینی است و برای این منظور، روبات مجبور است اطلاعات زیادی را در مدت زمانی کوتاه مورد تجزیه و تحلیل قرار دهد؛ بر این اساس، محققان برای آموزش این روبات به جای برنامههای از پیش تعیینشده از روشهای یادگیری انسان استفاده کردند.
به این ترتیب، این روباتها با تقلید رفتار و آزمون و خطا، گرفتن اجسام را یاد میگیرند.






ارسال نظر