خبر خوش درباره انجام کارهای خانه!/ رباتی که پوست صیفیجات را میگیرد ساخته شد!

ربات جدید موسسه فناوری ماساچوست(MIT) به قدری دقیق است که میتواند به آرامی با یک دست کدو را نگه دارد و با دست دیگر آن را پوست بکند.
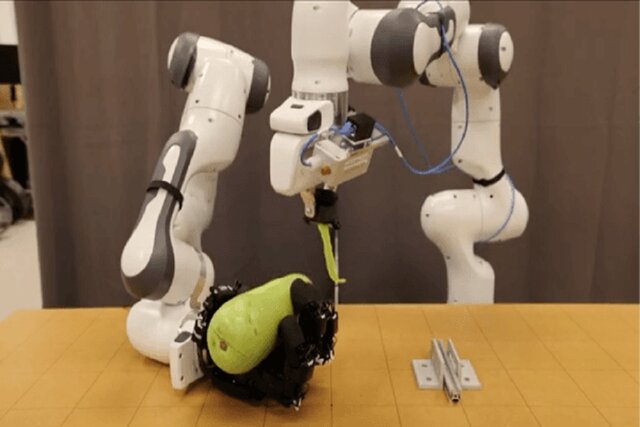
در ویدئویی که اخیرا منتشر شده، این ربات در حال پوست کندن کدو در حالی که آن را با یک دست گرفته و با دست دیگرش آن را پوست میکند، دیده میشود.
این سیستم رباتیک با استفاده از دست و انگشتان خود میتواند میوهها و صیفیجات را به راحتی بچرخاند و از دست دیگر خود برای پوست کندن آنها استفاده کند.
مطالعات اخیر پیشرفت قابل توجهی در پرداختن به مشکلات به اصطلاح «دستکاری ماهرانه» نشان دادهاند.
در این مطالعه جدید، محققان MIT بر روی دستکاری ماهرانه محدود برای لایهبرداری و پوستکنی مواد غذایی تمرکز کردند. لایهبرداری غذا محدودیتهای مختلفی را بر روی کنترل کننده جهتگیری مجدد، مانند نیاز به دست برای نگه داشتن ایمن جسم و سپس لایهبرداری از آن ایجاد میکند.
محققان میگویند: ما یک سیستم ساده برای یادگیری یک کنترل کننده جهتگیری مجدد ایجاد کردهایم که کار لایهبرداری را تسهیل میکند.
انسانها با گرفتن سیب زمینی در یک دست و پوست کندن آن با دست دیگر، پوست سیب زمینی را جدا میکنند. بعد از اینکه قسمتی از سیب زمینی پوست کنده شد، در حالی که در دست نگه داشته شده است، توسط انگشتان در دست چرخانده میشود و دوباره قسمتی که هنوز پوست دارد، پوست کنده میشود. این چرخش و پوست کندن ادامه مییابد تا زمانی که تمام پوست سیب زمینی جدا شود.
محققان میگویند: در این کار، ما یک سیستم رباتیک را ارائه میکنیم که میتواند صیفیجات مختلف را با استفاده از دست خود به گونهای تغییر جهت دهد که پوست آنها با استفاده از دست دیگر جدا شود.
این سیستم دستکاری ماهرانه روی بازوی ربات فرانکا(Franka) برای تغییر جهت دادن مواد غذایی برای لایهبرداری تعبیه شده است. بازوی دیگر ربات فرانکا نیز از گیره خود برای گرفتن یک پوستکن و پوست کندن ماده غذایی استفاده میکند.
این کنترل کننده جهتگیری مجدد از طریق «یادگیری تقویتی» آموزش داده میشود، در حالی که فرآیند پوست کندن از طریق عملیات از راه دور انجام میشود.
محققان روند تغییر جهت و پوست کندن خربزه، سیب زمینی و کدو را در تصاویر منتشر شده نشان دادند.
کنترل کننده جهتگیری مجدد ارائه شده در این مطالعه یک کنترل کننده کور است که صرفاً بر اطلاعات حسی عمیق متکی است. این کنترل کننده در حالی که توانایی تغییر جهت موفقیت آمیز اجسام سنگین و نگه داشتن ایمن آنها را نشان داده است، عملکرد آن به طور بالقوه میتواند با ترکیب بازخورد بصری و لمسی افزایش یابد.
پولکیت آگراوال استادیار دپارتمان مهندسی برق و علوم کامپیوتر در MIT گفت: این مراحل اضافی و انجام چرخش چیزی است که برای انسان بسیار ساده است، به طوری که ما حتی به آن فکر نمیکنیم، اما برای یک ربات، این چالش برانگیز میشود.
سیستم فعلی چند نقص دارد. اول اینکه جسم ممکن است از دست ربات خارج شود، زیرا کنترل کننده از هیچ اطلاعات بینایی استفاده نمیکند. دوم اینکه اگر ماده غذایی کوچک باشد، ممکن است کنترل کننده از کار بیفتد، زیرا انگشتان ربات نمیتوانند به طور موثر با جسم تماس برقرار کنند.
بخش سایتخوان، صرفا بازتابدهنده اخبار رسانههای رسمی کشور است.